支持散裝揀選的三維機械手視覺系統(tǒng)

導入工業(yè)用機械手時,不僅要選擇合適的機械臂和機械手,還要對周邊裝置及設備進行調整。除此以外,作業(yè)人員的學習和經(jīng)驗也相當重要。為了解決這些課題,人們將視線聚焦到了“三維機械手視覺系統(tǒng)(3D機械手視覺系統(tǒng))”上。本次,我們將以需求尤為突出的散裝揀選用三維機械手視覺系統(tǒng)為例,介紹導入的優(yōu)點及注意事項,并對基恩士三維機械手視覺系統(tǒng)“CV-X480D”的優(yōu)異性等進行說明。

何謂散裝揀選
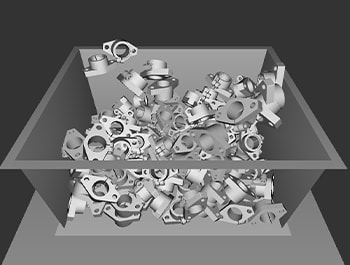
散裝揀選作業(yè),就是對部件箱等容器內的散裝工件進行揀選。例如,在組裝產品時將工件從部件箱中揀選出來,或是根據(jù)不同收貨地點進行分揀紙箱的堆垛/卸垛。
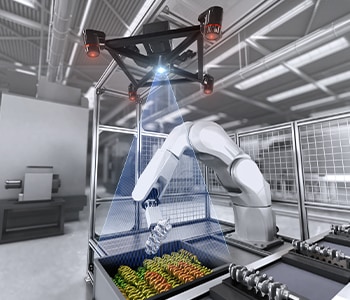
機械手的散裝揀選作業(yè),不光要用到工業(yè)用機械手,還必須配備識別工件位置的“相機(傳感器)”,以及根據(jù)拍攝所得圖像數(shù)據(jù)來控制機械臂的“圖像處理系統(tǒng)”。尤其是在立體堆疊工件的散裝揀選中,不僅要識別橫縱方向,還要對高度等空間信息進行識別。因此,不能采用二維機械手視覺系統(tǒng),必須導入三維機械手視覺系統(tǒng)。
可進行散裝/堆疊揀選的工件
相信大家在研究導入三維機械手視覺系統(tǒng)的過程中,都會提出這樣一個問題——“各種工件都適用嗎?”。 對于多曲面形狀、柔軟物體、結構復雜的部件等各式各樣的部件、產品,三維機械手視覺系統(tǒng)均可進行高精度的三維識別。因此,不論是螺絲、螺栓、齒輪、連桿之類的小型汽車部件,還是車門窗框、消聲器等大型部件,不管是金屬材質還是樹脂、橡膠產品,均可準確識別。對于各類形狀(圓柱形、薄板等)和材質(表面反光材料、砂面材料等)的部件、產品也可準確識別。

曲軸

連桿

變速箱

散熱器

差速齒輪

等速萬向節(jié)(CVJ)

沖壓金屬件

螺栓

汽車空調部件

燒結金屬件

電池
各工件 三維機械手視覺系統(tǒng) 應用視頻
可以對各類形狀/材質的工件進行穩(wěn)定揀選。詳情請查看下列視頻。






舉個例子,對于形狀復雜、分量較重的汽車發(fā)動機曲軸等部件,只要有效利用三維機械手視覺系統(tǒng),同樣能進行散裝揀選。以曲軸為代表的鍛造材料較為沉重,重復進行人工揀選,會對作業(yè)人員的身體造成較大的負擔。還存在因掉落引發(fā)事故的危險性。利用三維機械手視覺系統(tǒng)進行散裝揀選,可根據(jù)拍攝所得的數(shù)據(jù),抓握曲軸的中心軸部分,切實完成抓取與放置。這不僅能減輕作業(yè)人員的身體負擔,還可杜絕事故的發(fā)生。
散裝揀選的優(yōu)點
導入三維機械手視覺系統(tǒng)揀選散裝工件,能帶來許多好處。下面將圍繞基于機械手的自動化散裝揀選,對相關優(yōu)點進行介紹。
- 優(yōu)點1緩解勞動力短缺
- 生產現(xiàn)場正面臨著日益嚴峻的勞動力短缺問題。用機械手替代人工完成揀選作業(yè),有助于緩解勞動力短缺。
- 優(yōu)點2削減人工費
- 用機械手替代人工進行散裝揀選,不會產生加班費等薪酬支出,可有效削減成本。機械手可進行24小時不間斷的穩(wěn)定運行。
- 優(yōu)點3部件進料的自動化
- 在二維機械手視覺系統(tǒng)的生產現(xiàn)場,會利用供料器、夾具等工具,對部件進行整列,以便機械手實施揀選。而在使用三維機械手視覺系統(tǒng)的散裝揀選中,可省去上述的部件整列作業(yè)。故而可削減人力和工時,有助于提升生產效率。
- 優(yōu)點4防止不良品的產生
- 利用三維機械手視覺系統(tǒng)揀選散裝工件,可減少在進行工件整列時發(fā)生的忘記放置、方向放反等人為錯誤。還能有效預防此類人為錯誤導致的不良品問題。
- 優(yōu)點5有效利用空間
- 作業(yè)工序和生產品種增加時,供料器和夾具的數(shù)量也會增多,難以確保安裝位置。但是,如果用三維機械手視覺系統(tǒng)進行散裝揀選,可以將供料器等周邊設備的用量降至理想程度,在有限的空間內構建生產線。
- 優(yōu)點6穩(wěn)定作業(yè)速度
- 人工擺放工件或將工件投放至機械手時,作業(yè)人員的熟練度會使作業(yè)速度產生差異。但是,如果能實現(xiàn)包含散裝揀選在內的全流程機械手作業(yè)化,就能將作業(yè)速度的差異降至理想范圍,縮短產距時間。
- 優(yōu)點7也可支持大型工件
- 人工進行揀選作業(yè)時,如果要面對大型工件或沉重的工件,會對作業(yè)人員造成較大的負擔。某些工件可能還必須由多名作業(yè)人員同時操作。利用機械手,不論是大型工件還是沉重工件,都能進行安全準確的揀選。
三維機械手視覺系統(tǒng)的實際應用
下面將圍繞三維機械手視覺系統(tǒng)的實際應用,以“散裝揀選”、“堆垛/卸垛”、“堆疊揀選”為例,進行介紹。除此以外,三維機械手視覺系統(tǒng)還可用于各類用途,如有需要,請務必詳詢基恩士。基恩士將為您提供適宜的三維機械手視覺系統(tǒng)導入方法。
散裝揀選

二維機械手視覺系統(tǒng)的揀選需要將工件裝設到夾具上,或將部件排列在零件托盤上,安裝供料器等,費時費力地進行揀選。而利用三維機械手視覺系統(tǒng)進行揀選,則可識別散裝部件,進行隨機揀選。可有效削減用于工件整列的工序和人力,以超少的周邊設備實現(xiàn)高效揀選。
堆垛/卸垛

將貨物裝載到車輛或托盤上的“堆垛”作業(yè),以及將貨物卸下的“卸垛”作業(yè)。如需實現(xiàn)上述作業(yè)的自動化,必須借助“堆垛機”、“堆垛系統(tǒng)”等專屬裝置。但是,只要利用三維機械手視覺系統(tǒng),憑借常規(guī)工業(yè)用機械手同樣可完成這些作業(yè)。還無需配備專屬裝置,具有可支持多品種的優(yōu)點。
堆疊揀選

縱向堆放箱子等物品的作業(yè)被稱為“堆疊”,此類逐步改變堆放位置的作業(yè),同樣是三維機械手視覺系統(tǒng)的適用領域。采用三維機械手視覺系統(tǒng),不僅能判斷縱/橫方向,還能正確識別高度,辨別逐漸變化的工件位置。還能識別品種,在多種工件混合存在的情況下,也能完成堆疊揀選作業(yè)。
機械手視覺讓作業(yè)變得更加自由!FA機械手揀選案例

基恩士三維機械手視覺系統(tǒng)的特點
基恩士推出了支持散裝揀選的三維機械手視覺系統(tǒng)“CV-X480D”。下面將為您介紹基恩士的三維機械手視覺系統(tǒng)“CV-X480D”,說明它的具體特點。
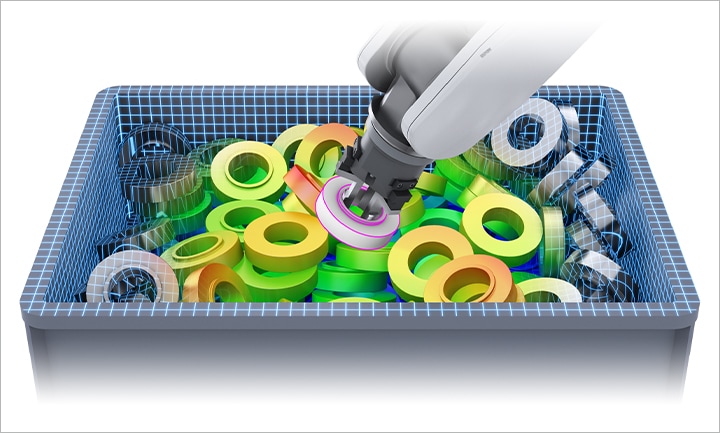
在深箱中也能切實抓取工件
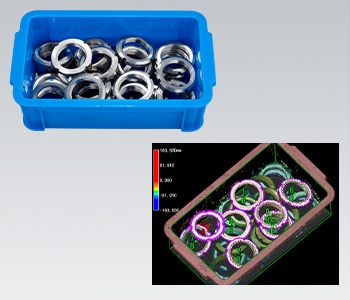
三維機械手視覺系統(tǒng)“CV-X480D”可實現(xiàn)不易受方向性及死角影響的檢測。由于4臺相機可生成無死角的圖像,三維檢測能在超快的速度內提供適宜的檢測結果。還能識別工件的位置和朝向,實現(xiàn)穩(wěn)定檢測。以深箱中的工件為例,“CV-X480D”可以在不與箱體及其他工件相撞的情況下完成揀選。
根據(jù)周圍環(huán)境自動計算出機械手動作
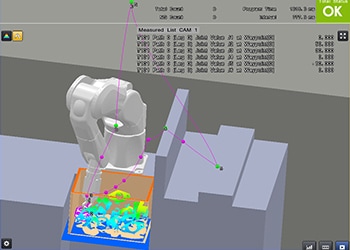
三維機械手視覺系統(tǒng)“CV-X480D”配備了“路徑生成工具”,可自動計算軌跡,在避開障礙物的同時,不干擾機械臂。有效利用該功能并設定環(huán)境布局,可根據(jù)周邊設備干擾及機械手姿勢,自動計算出使臂部不會干擾箱體、避開障礙物的軌跡。還配備了可事先驗證揀選效果的“揀選模擬器”,只要有效利用該功能,就能避免啟動時的浪費,使工件揀取的成功率得到飛躍性的提升。
無需工序切換和工件儲料器,實現(xiàn)部件投放自動化
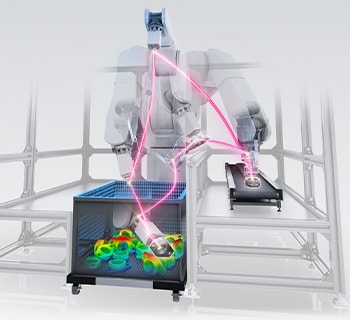
導入三維機械手視覺系統(tǒng)“CV-X480D”后,不再需要工序切換和工件儲料器,可實現(xiàn)自動化部件投放。能以更少的工時覆蓋多種工件,實現(xiàn)產距時間的大幅縮短。“CV-X480D”還配備了一鍵即可完成操作的“三維自動圖像校正”,省去了手動調整的時間和精力,可實現(xiàn)順利啟動。
空間有限時也能導入工業(yè)用機械手
使用二維機械手視覺系統(tǒng),在導入工業(yè)用機械手時,必須配備架臺、傳送帶、儲料器等周邊裝置及設備。而導入三維機械手視覺系統(tǒng)后,不再需要這些配套裝置,在空間有限時也能導入工業(yè)用機械手,實現(xiàn)工序的自動化。此外,用戶只需更改程序,就能將其用于多種工件,適用于支持多品種生產的流水線設計。
路徑生成功能/揀選模擬器 應用視頻
基恩士的產品可考慮到周邊設備干擾及機械手的姿勢,自動計算出適宜的機械手路徑。下面將以視頻的形式,向您詳細介紹。





搭配使用三維機械手視覺系統(tǒng)與面型相機
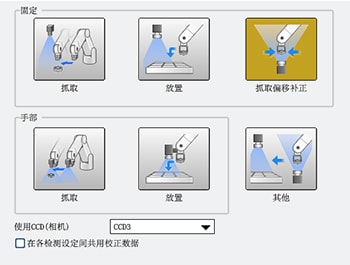
除了三維機械手視覺系統(tǒng)自帶的相機以外,基恩士的三維機械手視覺系統(tǒng)“CV-X480D”還可選裝面型相機擴展單元,從20種相機中自由選擇多達2種。借助上述擴展單元,用戶不僅能用三維機械手視覺系統(tǒng)揀選散裝工件,還能利用面型相機(二維機械手視覺系統(tǒng)),實現(xiàn)抓取偏差補償、品種識別、放置位置偏差補償?shù)裙δ堋4钆涫褂萌S機械手視覺系統(tǒng)和面型相機,不僅能提升精度,還能同時開展其他作業(yè)。這樣的高度發(fā)展性,也是基恩士三維機械手視覺系統(tǒng)的魅力所在。

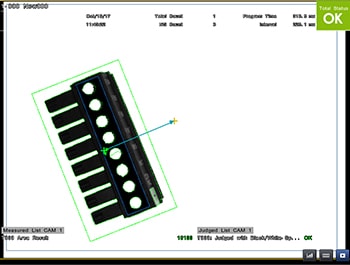
抓取偏差補償/品種識別
通過二維機械手視覺系統(tǒng)對散裝揀選后的工件進行高精度定位。同時對工件的品種、表面反面、方向等進行識別。
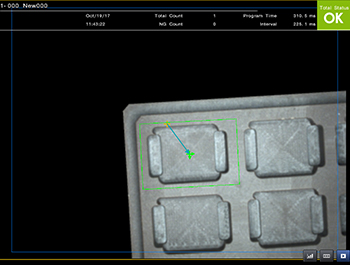
放置位置偏差補償
用二維機械手視覺系統(tǒng)檢測放置托盤的位置偏差。將通過抓取偏差補償獲得的偏差量與托盤位置偏差量結合起來計算,得出適宜的補償量。
可與二維機械手視覺系統(tǒng)輕松實現(xiàn)聯(lián)動
基恩士的“CV-X480D”能夠輕松地與二維機械手視覺系統(tǒng)進行聯(lián)動。只需根據(jù)補償動作選擇適合的應用,即可在短時間內完成妥善設置。

可以在揀選散裝工件的同時,開展品種識別、有無檢測等
搭配使用面型相機,即可在利用三維機械手視覺系統(tǒng)揀選散裝工件的同時,開展品種識別、有無檢測等,讓作業(yè)效率更高。

基恩士三維機械手視覺系統(tǒng)受到青睞的理由
最后,將為您介紹基恩士三維機械手視覺系統(tǒng)“CV-X480D”的優(yōu)點,以及它備受客戶青睞的理由。
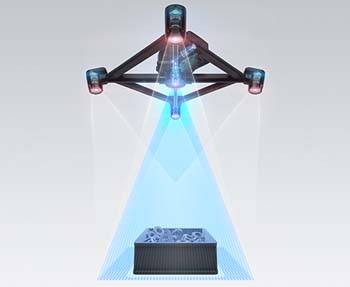
專屬設計的光學系統(tǒng)
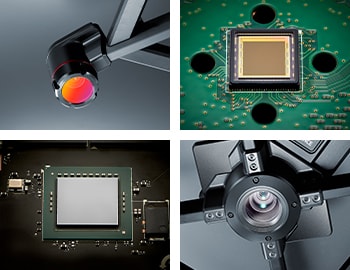
三維機械手視覺系統(tǒng)“CV-X480D”使用4臺相機從不同角度進行拍攝,可生成無死角的穩(wěn)定三維圖像。還配備了高精度CMOS傳感器、高速處理器、專屬設計投影儀,可實現(xiàn)高精度、高速、高性能的工件檢測。
散裝環(huán)境的再現(xiàn)
三維機械手視覺系統(tǒng)“CV-X480D”可利用專屬物理引擎,逼真再現(xiàn)散裝狀態(tài)。無需準備工件及箱子的實物,即可在計算機上進行物理模擬。能夠在計算機上進行與現(xiàn)場環(huán)境相近的模擬,可省去準備實體設備的麻煩。
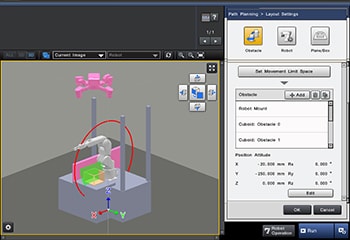
配備路徑生成工具
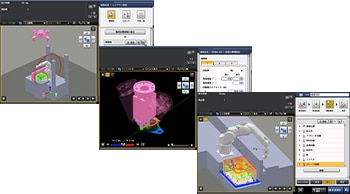
三維機械手視覺系統(tǒng)“CV-X480D”配備了“路徑生成工具”和“揀選模擬器”,能夠在計算機上進行模擬。利用路徑生成工具設定環(huán)境布局,即可在避開障礙物的同時,自動計算出適宜路徑。不僅能在畫面上配置機械手、箱體、障礙物,還可對工件的抓取位置等進行示教,上述功能只需操作鼠標即可完成,具有無需預先掌握相關知識的特點。
如果您想進一步了解基恩士的三維機械手視覺系統(tǒng)“CV-X480D”,請查看下列資料。




![圖像處理 應用示例集 [運輸行業(yè)]](/img/asset/AS_71700_L.jpg)

![圖像處理 全新應用示例集 [食品/醫(yī)藥品行業(yè)]](/img/asset/AS_72815_L.jpg)
![圖像處理 全新應用示例集 [電子零件/電子設備行業(yè)]](/img/asset/AS_86832_L.jpg)